
What is PID Control?
PID Control is one of the most important technologies in robotics and automation.
PID stands for:
- Proportional
- Integral
- Derivative
A PID controller continuously calculates error and automatically corrects a system to achieve the desired target.
PID controllers are heavily used in:
- self-balancing robots
- drones
- robotic arms
- autonomous vehicles
- CNC machines
- industrial robots
- humanoid robots
- motion simulators
Why Control Systems are Important in Robotics
Modern robots constantly interact with dynamic environments.
Without proper control systems:
- robots become unstable
- motors overshoot targets
- drones crash
- balancing robots fall
- robotic arms vibrate
- autonomous systems become inaccurate
Control systems help robots:
- maintain stability
- follow trajectories
- reduce errors
- achieve smooth motion
- improve precision
Understanding Error in Control Systems
A control system works by minimizing error.
Error is defined as:
Desired Value − Actual Value
For example:
- desired angle = 0°
- actual angle = 10°
- error = −10°
The controller continuously reduces this error.
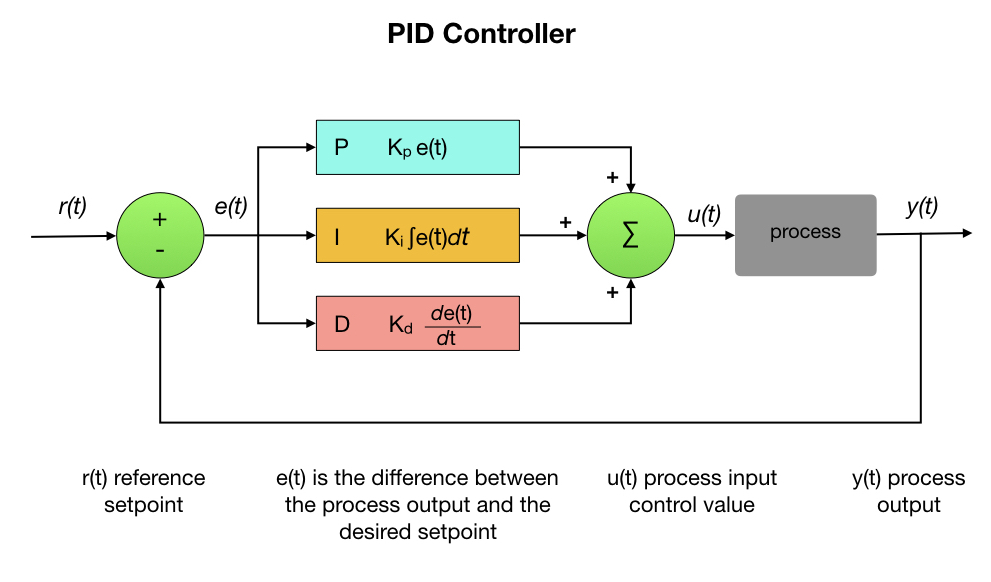
PID Control Equation
The PID controller equation is:
[ u(t)=K_p e(t)+K_i \int e(t)dt+K_d \frac ]
Where:
- (K_p) = proportional gain
- (K_i) = integral gain
- (K_d) = derivative gain
- (e(t)) = error
- (u(t)) = control output
PID Controller Block Diagram
+----------------+
Setpoint → | PID Controller | → Motor / Robot → Output
+----------------+
↑
|
Feedback Sensor
Proportional Control (P)
The proportional term reacts directly to current error.
Formula:
[ P = K_p e(t) ]
Advantages:
- fast response
- simple implementation
- improved reaction speed
Problems:
- steady-state error may remain
- too high gain causes oscillation
Proportional Response Graph
Error
│
│ /
│ /
│ /
│ /
│/
└──────────────── Output
Integral Control (I)
The integral term accumulates past errors over time.
Formula:
[ I = K_i \int e(t)dt ]
Purpose:
- removes steady-state error
- improves long-term accuracy
Problems:
- excessive integral gain causes overshoot
- may create instability
Integral Response Graph
Accumulated Error
│
│ ________
│ /
│ /
│/
└──────────────── Time
Derivative Control (D)
The derivative term predicts future behavior using the rate of change of error.
Formula:
[ D = K_d \frac ]
Purpose:
- reduces oscillation
- improves stability
- smooths robot motion
Derivative Response Graph
Oscillation
│\\ /\\ /\\
│ \\ / \\ /
│ \\__/ \\__/
│
└──────────────── Time
Combined PID Response
A properly tuned PID controller gives:
- fast response
- minimal overshoot
- smooth stabilization
- accurate positioning
Target
│ _________
│ __/
│ __/
│ __/
│_____/
└──────────────── Time
PID Tuning
PID tuning means selecting good values for:
- (K_p)
- (K_i)
- (K_d)
Poor tuning causes:
- instability
- oscillation
- slow response
- overshoot
- vibration
Common tuning methods:
- manual tuning
- Ziegler–Nichols method
- auto tuning
- AI-based tuning
PID in Self-Balancing Robots
Self-balancing robots are one of the best ways to learn PID control.
The robot continuously:
- measures tilt angle
- calculates error
- computes PID output
- drives motors
- restores balance
Without PID:
- the robot falls immediately
With PID:
- the robot balances dynamically
PID in Drones
Drones heavily depend on PID control.
PID stabilizes:
- pitch
- roll
- yaw
- altitude
Without PID:
- drones become unstable and crash
PID in Robotic Arms
Robotic arms use PID controllers for:
- joint control
- trajectory following
- smooth positioning
- motor synchronization
Industrial robotic arms rely heavily on motion control algorithms.
Sensors Used in PID Systems
PID controllers require feedback sensors.
Common sensors:
- encoders
- IMU
- gyroscope
- accelerometer
- potentiometer
- LiDAR
- vision systems
Embedded Systems and PID
PID control is commonly implemented on:
- Arduino
- STM32
- ESP32
- Raspberry Pi
- industrial PLCs
- real-time Linux systems
Real-Time Control Systems
Robotics control systems often require real-time performance.
Real-time systems ensure:
- deterministic timing
- stable control loops
- predictable motion
Advanced Control Systems Beyond PID
Advanced robotics systems may use:
- Model Predictive Control (MPC)
- Adaptive Control
- Fuzzy Logic Control
- Reinforcement Learning Control
- Sliding Mode Control
However, PID remains one of the most widely used controllers because of its simplicity and effectiveness.
Mathematics Required for Control Systems
Important mathematics topics:
- calculus
- differential equations
- linear algebra
- Laplace transforms
- transfer functions
- system dynamics
Best Way to Learn PID Control
Recommended learning path:
- Learn basic electronics
- Learn motors and sensors
- Build a balancing robot
- Learn Arduino or STM32
- Understand feedback loops
- Experiment with PID tuning
- Study robotics dynamics
Beginner Control System Projects
Good beginner projects:
- line follower robot
- motor speed controller
- balancing robot
- servo position control
- pan-tilt camera system
Advanced Robotics Control Projects
Advanced projects:
- autonomous drone
- Stewart platform
- robotic arm motion control
- humanoid balancing system
- autonomous vehicle control
Future of Robotics Control Systems
Future robotics systems will increasingly combine:
- AI
- machine learning
- adaptive control
- real-time optimization
- computer vision
- predictive systems
Control systems will remain the core foundation of autonomous robotics.
Conclusion
PID Control is one of the most important technologies in robotics and automation.
It allows robots to:
- stabilize themselves
- follow trajectories
- control motion accurately
- interact safely with the real world
By learning:
- PID control
- sensors
- embedded systems
- robotics dynamics
- motion control
students can build highly advanced robotics systems.
Frequently Asked Questions
Master Robotics Control Systems
Control Systems are one of the most important foundations of robotics engineering. Start with simple PID projects, motors, sensors, and balancing systems. Every advanced robotics engineer once started with their first motor controller, first balancing robot, and first feedback loop experiment.